Tiivistelmä
Trukkiliikenne kuuluu teollisuuden ja logistiikan arkeen, mutta siihen liittyy myös merkittäviä turvallisuusriskejä. Näkyvyyttä heikentävät esimerkiksi trukin rakenteet, kuormat, ahtaat kulkuväylät ja vaihtelevat ympäristöolosuhteet. Konenäkö tarjoaa yhden mahdollisen keinon tukea kuljettajan havainnointia erityisesti tilanteissa, joissa ihmisen havaitseminen on vaikeaa pelkän suoran näköyhteyden perusteella. Tässä artikkelissa tarkastellaan RoboAI-akatemiassa suunniteltua ja testattua konenäköön perustuvaa ratkaisua, jossa järjestelmä tunnistaa ihmisen kuvasta ja antaa kuljettajalle hälytyksen, kun henkilö havaitaan ennalta määritellyllä riskialueella. Ratkaisu tuottaa sekä visuaalisen että auditiivisen varoituksen. Sen tavoitteena on varoittaa kuljettajaa riittävän ajoissa ennen vaaratilanteen syntymistä erityisesti tilanteissa, joissa näkyvyys on rajoittunut. Tällainen lähestymistapa voi tukea erityisesti trukin sokeiden kulmien valvontaa ja täydentää kuljettajan omaa havainnointia. Tarkastelu osoittaa, että konenäkö voi parantaa tilannetietoisuutta, mutta käytännön toimintavarmuus edellyttää huolellista suunnittelua muun muassa kameran sijoittelun, valaistusolosuhteiden, tunnistuslogiikan, hälytysrajojen ja ympäristön vaihtelun huomioimisessa.
Trukkiliikenteen turvallisuus tarvitsee uusia ratkaisuja
Trukkiliikenteessä turvallisuus perustuu pitkälti kuljettajan havainnointikykyyn, ajotapaan ja työympäristön selkeyteen. Käytännössä näkyvyys ei kuitenkaan ole aina esteetön. Trukin runko, masto, haarukat ja kuljetettava kuorma voivat peittää näkymää eteen ja sivuille, ja etenkin risteävissä kulkureiteissä tai ahtaissa sisätiloissa vaaratilanteet voivat syntyä nopeasti. Siksi teknologioilta odotetaan yhä enemmän tukea kuljettajan päätöksenteolle ja ympäristön havainnoinnille.
Yksi kiinnostava vaihtoehto trukin kuljettajaa avustavaksi teknologiaksi on konenäkö. Sen etuna on, että järjestelmä voi tunnistaa ihmisen suoraan kameran kuvasta ilman, että jalankulkijalla on mukanaan erillistä tunnistetta, lähetintä tai turvaliivin elektroniikkaa. Tämä tekee ratkaisusta käyttäjälle huomaamattoman ja mahdollistaa turvallisuuden tukemisen myös tilanteissa, joissa alueella liikkuu henkilöitä useissa eri rooleissa. Samalla konenäkö tuo kuitenkin mukanaan omat haasteensa: valaistus vaihtelee, auringon kirkas valo voi estää näkemisen kokonaan, taustat muuttuvat, näkökentässä voi olla muita koneita, rakenteita tai höyryä, ja henkilö voi näkyä kuvassa vain osittain.
Yhteistyössä kehitetty demonstraatio turvallisemman trukkiliikenteen tueksi
Työ eteni RoboAI-akatemian opiskelijoiden ja hankkeen tutkijoiden yhteistyönä, ja sen tavoitteena oli selvittää, miten konenäköä voitaisiin hyödyntää trukkiliikenteen turvallisuuden parantamisessa. Tarkoituksena ei ollut rakentaa vielä teolliseen käyttöön valmista tuotetta, vaan kehittää laboratorio-olosuhteisiin demonstraatio, joka havainnollistaa toimintaperiaatetta ja tukee teknologian soveltuvuuden arviointia käytännön tarpeisiin.
Projektin alkuvaiheessa opiskelijat perehtyivät konenäön perusteisiin ja vertailivat erilaisia tapoja tunnistaa henkilöitä kameran kuvasta. Tarkastelun kohteena oli erityisesti se, miten järjestelmä erottaisi ihmisen muista kohteista luotettavasti ja riittävän nopeasti. Turvallisuussovelluksessa olennaista ei ole ainoastaan tunnistuksen tarkkuus, vaan myös se, että järjestelmä reagoi riittävän nopeasti ja esittää hälytyksen kuljettajalle ymmärrettävästi.
Kameravalinnat ja tekninen toteutus
Suunnittelussa huomioitiin myös kameraratkaisun käytännöllisyys. Alkuperäisenä ajatuksena oli hyödyntää konenäkökameroita, sillä niiden kuvanlaatu ja kuvataajuus ovat tyypillisesti hyviä. Projektin kannalta keskeiseksi kysymykseksi nousi kuitenkin tarkennus. Monissa teollisissa konenäkökameroissa tarkennus säädetään käsin, mikä voi vaikeuttaa käyttöä tilanteissa, joissa kuvausetäisyys vaihtelee. Tästä syystä demonstraatiojärjestelmässä päädyttiin käyttämään hyvälaatuista webbikameraa, jonka automaattitarkennus soveltui laboratorioympäristön tarpeisiin hyvin. Ratkaisu oli käytännöllinen ja tuki projektin tavoitetta: osoittaa toimintaperiaate luotettavasti ilman raskasta laitteistointegraatiota.
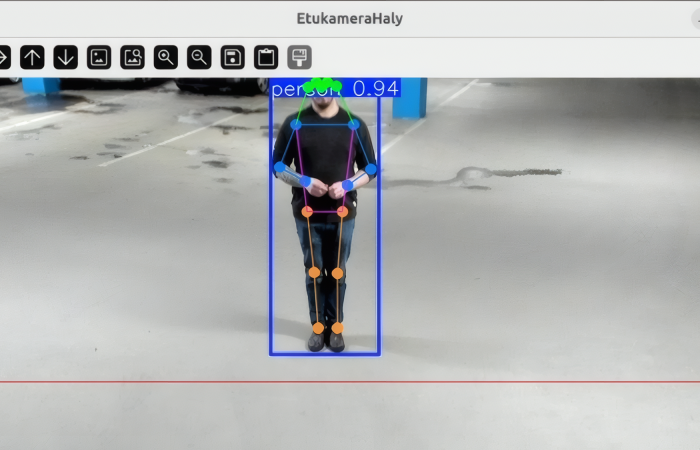
Rakennetussa demonstraatiossa kamera tuottaa jatkuvaa videokuvaa, jota ohjelma analysoi reaaliaikaisesti. Kun järjestelmä havaitsee kuvasta ihmisen, se merkitsee tämän näkyviin rajauslaatikolla (Kuva 1). Kameran kuvaan määriteltiin lisäksi hälytysraja, joka vastaa riskialuetta trukin ympärillä. Kun havaitun henkilön ympärille piirtynyt rajauslaatikko siirtyy tämän rajan sisäpuolelle, järjestelmä aktivoi hälytyksen. Hälytys toteutettiin kahdella tavalla: ohjelma tuottaa äänimerkin, ja samalla Arduino-ohjattu led-järjestelmä antaa visuaalisen varoituksen. Näin kuljettajalle välittyy tieto vaaratilanteesta useamman aistin kautta.
Demonstraatio havainnollisti toimintaperiaatteen
Demonstraation vahvuus oli se, että se ei jäänyt pelkäksi teoriaksi. Järjestelmällä voitiin testata ja näyttää konkreettisesti, miltä konenäköavusteinen turvallisuusratkaisu voisi käytännössä näyttää. Tulosten perusteella tunnistus toimi myös tilanteissa, joissa ihminen ei ollut kameran edessä täysin suorassa tai näkyi osittain esteiden takaa. Tämä on tärkeä havainto, koska todellisessa työympäristössä ihmiset eivät liiku kameralle optimaalisissa asennoissa, vaan voivat esimerkiksi kumartua, kääntyä, työskennellä ajoneuvon lähellä tai näkyä vain osittain rakenteiden lomasta.
Työn keskeinen hyöty oli asiakkaan näkemyksen konkretisoiminen. Kun ideasta rakennetaan toimiva demonstraatio, keskustelu siirtyy helposti yleisistä toiveista kohti tarkempia teknisiä ja toiminnallisia vaatimuksia. Samalla on mahdollista arvioida, millaisia hälytyslogiikoita tarvitaan, mihin kamera kannattaa sijoittaa, millainen näkökenttä on riittävä ja miten väärät hälytykset voidaan pitää hallinnassa. Tällainen prototyyppivaiheen työ on usein ratkaisevaa ennen kuin järjestelmää kannattaa viedä laajempiin kenttätesteihin.

Konenäön hyödyt ja käytännön haasteet
Tulokset osoittivat, että konenäkö voi olla varteenotettava keino tukea trukkiliikenteen turvallisuutta erityisesti sokeissa kulmissa olevien ihmisten havaitsemisessa. Se ei kuitenkaan yksin ratkaise kaikkea. Teollisessa ympäristössä järjestelmän toimintaan vaikuttavat valaistuksen vaihtelut, likaantuvat linssit, sääolosuhteet, heijastukset, pöly, höyry sekä ympäristön jatkuvat muutokset (Kuva 2). Lisäksi turvallisuuskriittisessä sovelluksessa on arvioitava tarkasti, milloin hälytys annetaan, miten kuljettaja siihen reagoi ja kuinka usein järjestelmä voi erehtyä ilman, että sen käytettävyys kärsii.
Jatkokehityksessä keskeisiä teemoja ovatkin laajempi testaus todellisissa käyttöympäristöissä, kamerasijoittelun optimointi, tunnistuksen luotettavuuden parantaminen sekä mahdollinen useamman anturin yhdistäminen. Konenäkö voi toimia tehokkaimmin osana laajempaa turvallisuusratkaisua, jossa kuljettajan havainnointia tuetaan usealla toisiaan täydentävällä menetelmällä.
Kohti turvallisempaa työympäristöä
UPM:n Rauman tehtaan kanssa tehty yhteistyö osoitti, että jo laboratorio-olosuhteissa rakennettu demonstraatio voi tuottaa arvokasta tietoa uuden turvallisuusteknologian mahdollisuuksista. Samalla työ havainnollisti, miten opiskelijoiden käytännön toteutusosaaminen ja tutkijoiden asiantuntemus voivat täydentää toisiaan turvallisuutta kehittävissä kokeiluissa. Konenäkö ei poista tarvetta hyvälle työympäristön suunnittelulle tai turvallisille toimintatavoille, mutta se voi tarjota kuljettajalle tärkeän lisänäön sinne, minne silmä ei yksin näe.
Joonas Kortelainen
Lehtori, 0000-0001-5393-2627, RoboAI-tutkimuskeskus
Joonas Kortelaisella on yli 15 vuoden kokemus teollisuuden konenäköjärjestelmien suunnittelusta ja toteuttamisesta. Hän opettaa konenäköä ja on vahvasti mukana vahvistamassa opiskelijoiden osaamista sekä laajentamassa ymmärrystä konenäön monipuolisista sovellusmahdollisuuksista.
Tommi Lehtinen
Lehtori, 0000-0002-1011-6563, RoboAI-tutkimuskeskus
Tommi Lehtinen on automaation moniosaaja, jolla on 15 vuoden kokemus soveltavasta tutkimuksesta. Hän tekee monipuolista automaation ja robotiikan tutkimusta, opettaa robotiikkaa ja tukee opiskelijoita hahmottamaan automaation ja robotiikan laajoja mahdollisuuksia teollisuuden erilaisissa toimintaympäristöissä.
Mirka Leino
Tutkijayliopettaja, johtava tutkija, 000-0002-0465-4197, RoboAI-tutkimuskeskus
Mirka Leinolla on yli 20 vuoden kokemus soveltavasta tutkimuksesta, TKI-hankkeiden vetämisestä sekä teknologiatiedonsiirrosta. Hänen tutkimustyönsä keskiössä ovat konenäkö ja älykäs robotiikka, ja lisäksi hän toimii robotiikan ja konenäön opettajana sekä RoboAI-akatemian vetäjänä.
Jesse Santaoja
RoboAI-akatemian opiskelija
Jesse Santaoja on monenlaisesta teknologiasta kiinnostunut insinööriopiskelija. Hänen tavoitteenaan on kehittyä monipuoliseksi robotiikan ja automaation osaajaksi.
Simo Reponen
RoboAI-akatemian opiskelija
Simo Reposella on kattavaa teknologiaosaamista erityisesti robotiikasta, automaatioteknologioista, sähkötekniikasta ja elektroniikasta. Hänen tavoitteenaan on kehittyä monialaiseksi projekti-insinööriksi teollisuuteen.


Artikkeli on kirjoitettu osana Tekoälyllä ja automaattisilla teknologioilla parempaa työturvallisuutta ihmisille – TATTI -hanketta, jolle Satakuntaliitto on myöntänyt EAKR-osarahoituksen.