Teollisuuden materiaalivirrat näkyviksi – tekoälytyökalujen käyttöön perustuva konenäkö kiertotalouden edistämisessä
URN:

Tiivistelmä
Kiertotalouden toteutuminen teollisuudessa edellyttää tarkkaa tietoa materiaalivirroista ja niiden koostumuksesta. Erityisesti kierrätysprosesseissa materiaalit ovat usein monimutkaisia seoksia, joiden tunnistaminen perinteisillä menetelmillä on hidasta, työlästä ja virheille altista. Satakunnan ammattikorkeakoulun RoboAI-tutkimuskeskuksessa kehitetään konenäköön ja tekoälyyn perustuvaa menetelmää teollisten materiaalivirtojen analysointiin. Menetelmän tavoitteena on tuottaa reaaliaikaista ja automaattista tietoa teollisuuden materiaalivirroissa tapahtuvista suhteellisista muutoksista muodossa, joka olisi helposti yritysten hyödynnettävissä.
Artikkelissa tarkastellaan erityisesti tekoälytyökalujen käyttöön perustuvan konenäön mahdollisuuksia materiaalien tunnistamisessa sekä sitä, millaista dataa tekoälyn kouluttaminen edellyttää. Lisäksi käsitellään olemassa olevia datasettejä, datan keräämiseen liittyviä haasteita ja niiden merkitystä konenäköjärjestelmien kehitykselle. Kehittyneet analysointimenetelmät voivat tulevaisuudessa tehostaa materiaalien lajittelua ja vähentää hukkaa sekä sitä kautta parantaa resurssitehokkuutta ja tukea kiertotalouden tavoitteiden saavuttamista teollisuudessa ja auttaa yrityksiä hyödyntämään materiaaleja entistä tehokkaammin.
Materiaalivirtojen tunteminen on osa kiertotaloutta
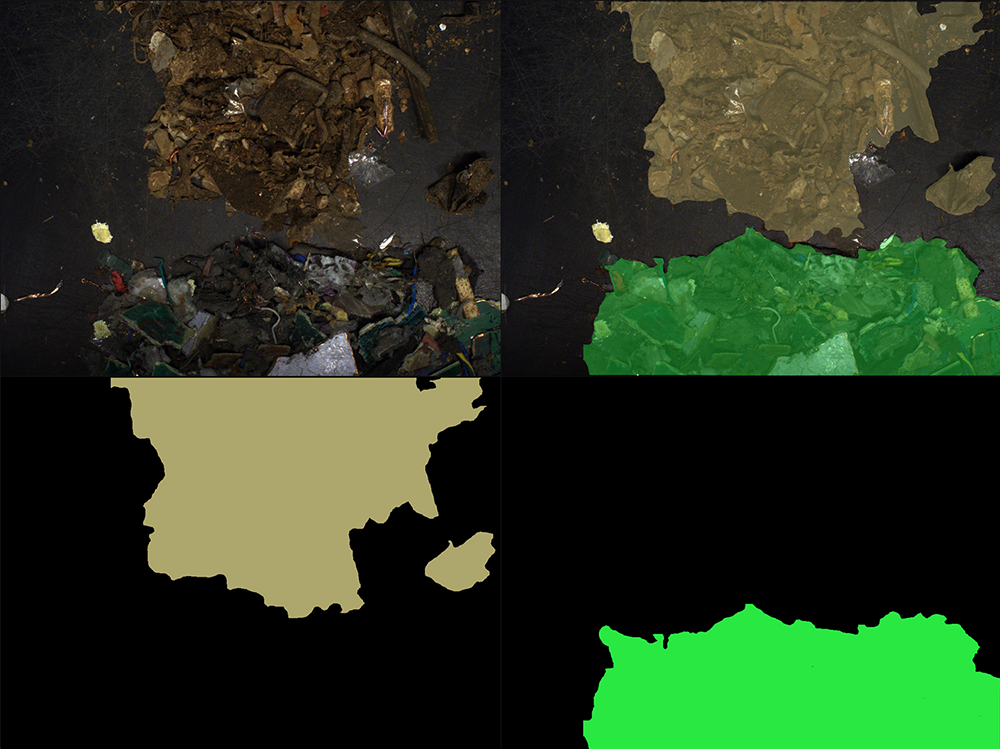
Kiertotalous perustuu ajatukseen, että materiaalit pysyvät kierrossa mahdollisimman pitkään. Käytännössä sen toteutuminen ei kuitenkaan ole yksinkertaista. Erityisesti teollisissa prosesseissa materiaalivirrat ovat usein monimutkaisia: samaan virtaan voi sekoittua arvokkaita metalleja, muoveja ja muita komponentteja (kuva 1), joiden tarkka tunnistaminen on haastavaa. Materiaalivirtojen mittaaminen ja ymmärtäminen on käytännön edellytys sille, että organisaatiot voivat toteuttaa perusteltuja kiertotaloustoimia.

Perinteisesti teollisuuden materiaalivirroissa materiaalien tunnistaminen ja lajittelu perustuu pitkälti manuaaliseen työhön tai pistemäisiin mittausmenetelmiin. Tämä tekee prosessista hidasta ja altista virheille. Samalla osa arvokkaista materiaaleista voi jäädä hyödyntämättä.
Miksi materiaalivirtojen analyysi on vaikeaa?
Yksi keskeinen haaste teollisuusyritysten materiaalivirtojen analysoinnissa on materiaalien epähomogeenisuus. Esimerkiksi kierrätykseen tuleva sähkö- ja elektroniikkaromu sisältää useita eri materiaaleja, jotka voivat olla tiiviisti toisiinsa kytkeytyneitä. Esimerkiksi sähköjohto näyttää ulospäin muovilta tai kumilta, mutta pitää sisällään myös kuparia tai alumiinia. Tällöin perinteinen ulkomuotoon perustuva arvio ei riitä, eikä yksittäinen mittausmenetelmä anna koko kuvaa materiaalin koostumuksesta. Lisäksi analyysin pitäisi tapahtua nopeasti. Teollisessa ympäristössä materiaalit liikkuvat usein erilaisilla kuljettimilla, jolloin tunnistuksen on toimittava lähes reaaliajassa.
Tällä hetkellä teollisuuden kiertotalousprosesseissa ei ole laajasti käytössä edullisia menetelmiä, jotka pystyisivät analysoimaan heterogeenisiä kierrätysraaka-aineita reaaliaikaisesti ja mittakaavaan soveltuvalla tavalla. Tekoälytyökalujen käyttöön perustuvan konenäön avulla on kuitenkin mahdollista kehittää uusia kustannustehokkaita menetelmiä, jotka parantavat teollisuuden kiertotalousprosessien tehokkuutta ja resurssiviisautta.
Tekoäly tuo uusia mahdollisuuksia
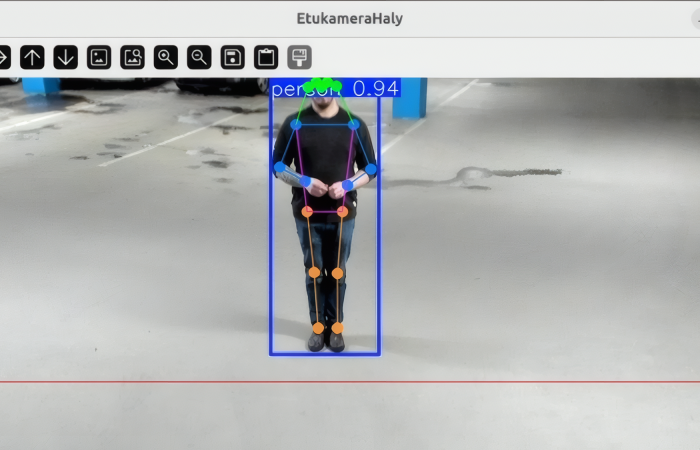
Tekoälymalleja hyödyntävät konenäkömenetelmät tarjoavat perinteisten analyysimenetelmien rinnalle uuden mittaustason, joka voi tuottaa jatkuvaa ja yhdenmukaista tietoa materiaalivirtojen koostumuksesta. Satakunnan ammattikorkeakoulun RoboAI-tutkimuskeskuksen GreenAIVision-hankkeessa kehitetään tällaista konenäköön ja tekoälyyn perustuvaa lähestymistapaa analysoimaan teollisia materiaalivirtoja, jotka sisältävät esimerkiksi metalleja ja muovia. Perusajatuksena on, että kuvantunnistukseen perustuvat mallit pystyvät analysoimaan visuaalista dataa ja tunnistamaan siitä toistuvia piirteitä, tässä tapauksessa eri materiaaleja (kuva 2).
GreenAIVision-hankkeessa kehitettävän menetelmän tavoitteena on ennen kaikkea tuottaa reaaliaikaista ja automaattista tietoa teollisuuden materiaalivirroissa tapahtuvista muutoksista tavalla, joka olisi edullinen ja helposti yritysten hyödynnettävissä. Hankkeessa ei tavoitella äärimmäisen tarkkoja mittaustuloksia, vaan tietoa materiaalivirtojen koostumuksessa tapahtuvista suhteellisista muutoksista. Jo suuntaa antava tieto materiaalin koostumuksen muutoksesta auttaa yrityksiä säätämään prosessejaan optimaalisemmiksi.
Miten tekoäly tunnistaa materiaaleja?
Konenäössä käytettävien tekoälymallien toimintaperiaate perustuu ihmisen näköjärjestelmää muistuttavaan ympäristön havainnointiin, jossa kuvasta tunnistetaan kohteita, niiden sijaintia ja keskinäisiä suhteita nopeasti ja automaattisesti (Redmon ym., 2016, s. 1). Kuvantunnistusmallit tulkitsevat visuaalista dataa etsimällä siitä opittuja säännönmukaisuuksia. Neuroverkot ovat keskeinen osa laajoja konenäkömalleja. Mallit hyödyntävät syviä konvoluutioneuroverkkoja, joissa alkuvaiheen kerrokset tunnistavat kuvista yksinkertaisia piirteitä ja myöhemmät kerrokset muodostavat niistä monimutkaisempia kokonaisuuksia kohteiden tunnistamiseksi (Redmon ym., 2016, s. 2–3).
Laajasti sekä kuva- että videotehtävissä käytetty YOLO on esimerkki avoimen lähdekoodin konenäkömallista, jolla voidaan tunnistaa kohteita monella eri tavalla riippuen siitä, mitä kuvasta halutaan havaita. Mallin kyky käsitellä koko kuva yhdellä analyysikerralla mahdollistaa jatkuvan ja nopean materiaalivirtojen seurannan myös teollisessa mittakaavassa (Redmon ym., 2016, s. 1). SAM (Segment Anything) puolestaan on esimerkki konenäkömallista, joka pystyy tunnistamaan ja erottamaan kohteita kuvassa riippumatta siitä, onko niitä esiintynyt mallin opetusmateriaalissa sellaisenaan (Kirillov ym., 2023, s. 4015).
Reaaliaikaiset kuvantunnistusmallit soveltuvat nopeasti muuttuvien tilanteiden automaattiseen havainnointiin, esimerkiksi kuljetinhihnoilla liikkuvien materiaalien tunnistamiseen. Tällaiset mallit mahdollistavat siten sen, että materiaalivirtoja voidaan ainakin teoriassa tarkastella jatkuvasti ja automaattisesti.
Entä data – mitä tarvitaan, jotta tekoäly oppii?
Tekoäly tarvitsee oppiakseen dataa. Avoimesti saatavilla olevat aineistot keskittyvät usein arkiympäristöihin kuten kotitalousjätteeseen. Sen sijaan teollisia materiaalivirtoja kuvaavia aineistoja on huomattavasti vähemmän. Kierrätysmateriaaleja kuvaavan opetusdatan tuottamista vaikeuttaa se, että materiaalit ovat usein epämuodostuneita, päällekkäisiä ja visuaalisesti vaihtelevia, mikä vaikeuttaa aineistojen annotointia ja konenäkömallien kouluttamista (Bashkirova ym., 2022, s. 1). Sopivien datasettien puuttuminen vaikuttaa suoraan siihen, miten nopeasti konenäköä voidaan ottaa käyttöön teollisissa olosuhteissa (Thielmann ym., 2025).
Vähäisyydestä huolimatta joitakin teolliseen käyttöön soveltuvia avoimia aineistoja on olemassa. Näitä ovat esimerkiksi ZeroWaste, WasteNet, WaRP ja Iron Ore Conveyor -datasetit. WaRP-datasetti on kehitetty erityisesti kierrätyslaitosten materiaalivirtojen tunnistamiseen (Yudin ym., 2023). Iron Ore Conveyor -datasetissä puolestaan kuvataan kuljetinhihnalla liikkuvaa materiaalia teollisessa ympäristössä (Martins de Sousa ym., 2025). Tällaiset datasetit mahdollistavat tekoälyn kouluttamisen tilanteisiin, jotka muistuttavat teollisuuden prosesseja. Teollisuuden materiaalivirtoja kuvaavia avoimesti saatavilla olevia datasettejä tarvitaan kuitenkin lisää, jotta tekoälymalleja voidaan kouluttaa luotettavasti erilaisiin teollisiin ympäristöihin.
GreenAIVision-hankkeessa avoimesti saatavilla olevien datasettien vähäisyyteen vastataan keräämällä tekoälymallien tarvitsemaa dataa yhteistyössä teollisuuden toimijoiden kanssa. Hankkeessa tavoitteena on tuottaa sellaista kuva-aineistoa, joka vastaa mahdollisimman hyvin todellisia teollisia materiaalivirtoja ja niiden vaihtelua. Kerättyä dataa hyödynnetään tekoälymallien kouluttamisessa sekä soveltamisessa materiaalivirtojen analysointiin.
Mitä hyötyä tästä on käytännössä?
Kun teollisuuden materiaalivirtoja pystytään analysoimaan tarkemmin, vaikutukset näkyvät monella tasolla. Lajittelu tehostuu ja hukkamateriaalin määrä vähenee samalla, kun kierrätysmateriaalin laatu tasoittuu ja sen hyödyntäminen teollisuudessa helpottuu. Prosessit muuttuvat sujuvammiksi ja manuaalisen työn tarve vähenee, kun analyysiä voidaan tehdä automaattisesti. Lisäksi päätöksenteko paranee, koska käytettävissä on ajantasaisempaa ja tarkempaa tietoa materiaalien koostumuksesta.
Laajemmin tarkasteltuna kyse on teollisuuden resurssitehokkuuden ja kiertotalouden edistämisestä. Kun tiedetään entistä tarkemmin, mitä materiaalivirroissa liikkuu, niitä voidaan hyödyntää tehokkaammin, ja samalla vähentää tarvetta käyttää neitseellisiä raaka-aineita.
Materiaalivirtojen analysointi on hyvä esimerkki siitä, miten digitalisaatio ja vihreä siirtymä kytkeytyvät toisiinsa. Kyse ei ole vain teknologiasta, vaan siitä, miten tietoa hyödynnetään käytännön toiminnassa. Konenäkö ei kuitenkaan ratkaise kaikkia haasteita yksin, mutta se tuo käyttöön uuden työkalun, joka mahdollistaa materiaalivirtojen tuntemisen aiempaa tarkemmin. Kun tämä yhdistetään teolliseen osaamiseen ja prosessien kehittämiseen, syntyy edellytyksiä entistä tehokkaammalle ja kestävämmälle kiertotaloudelle.
Materiaalivirtojen analysointiin liittyvät teknologiat kehittyvät nopeasti, joten soveltuvia analyysimenetelmiä kartoitetaan koko GreenAIVision-hankkeen ajan. Seuraavaksi hankkeen pääpaino siirtyy olemassa olevien menetelmien kartoituksesta teollisuuden teemahaastatteluihin, joissa yritysten tarpeita kehitettävälle järjestelmälle kartoitetaan aiempaa syvällisemmin.
Maija Salokangas
Hankeviestijä, RoboAI-tutkimuskeskus
Maija työskentelee viestijänä SAMKin RoboAI-tutkimuskeskuksessa. Hän osallistuu tutkimus- ja kehityshankkeiden viestintään sekä tekee näkyväksi tekoälyn, robotiikan ja kiertotalouden tutkimusta ymmärrettävässä muodossa.
Toni Seessalo
Päätoiminen tuntiopettaja, tutkija, RoboAI-tutkimuskeskus
Toni työskentelee hankkeessa projektipäällikkönä. Hän vastaa hankkeen etenemisen koordinoinnista, raportoinnista ja hallinnollisesta kokonaisuudesta. Lisäksi hän fasilitoi hankkeen työskentelyä, tukee asiantuntijoiden välistä yhteistyötä sekä huolehtii siitä, että hankkeen tavoitteet, aikataulut ja toimenpiteet etenevät suunnitellusti.
Pekka Suominen
Johtava tutkija, 0000-0001-9909-1229, RoboAI-tutkimuskeskus
Pekka työskentelee hankkeessa teknologiametallien kiertotalousasiantuntijana. Hän tuo osaamista kierrätysraaka-aineiden analysointiin, materiaalivirtojen kiertotalouteen sekä tekoäly- ja konenäköpohjaisten ratkaisujen soveltamiseen teollisuudessa.
Renato Liski
Projektityöntekijä, RoboAI-tutkimuskeskus
Renato toimii hankkeessa konenäön ja tekoälyn asiantuntijana. Hän tutkii ja testaa modernien tekoälymenetelmien soveltuvuutta teollisuuteen sekä kehittää käytännön ratkaisuja teknologian hyödyntämiseksi teollisuusympäristöissä.
Pauli Valo
Tutkija, 0000-0001-5182-7700, RoboAI-tutkimuskeskus
Pauli toimii GreenAIVision-hankkeessa laiterakennuksen asiantuntijana. Hän osallistuu kierrätysraaka-aineen analysointiin tarkoitetun konenäkö- ja tekoälypohjaisen järjestelmän kehittämiseen, prototyyppien rakentamiseen sekä laboratorio- ja teollisuusympäristöissä tehtäviin kokeiluihin. Hänen työnsä tukee ratkaisujen käytännön soveltamista materiaalien tunnistuksen, mittaamisen ja lajittelun tehostamiseksi.
Mirka Leino
Tutkijayliopettaja, johtava tutkija, 0000-0002-0465-4197, RoboAI-tutkimuskeskus
Mirka Leino toimii tutkijayliopettajana ja johtavana tutkijana Satakunnan ammattikorkeakoulun RoboAI-tutkimuskeskuksessa. Hänellä on reilun kahdenkymmenen vuoden tutkijakokemus ja hänen päätutkimusaiheitaan ovat konenäön, älykkään robotiikan, automaatioteknologian tekoälytyökalujen sekä teknologiansiirron soveltava tutkimus.




Artikkeli on kirjoitettu osana GreenAIVision – Kierrätysraaka-aineen analysointi tekoäly- ja konenäkömenetelmin -hanketta, joka on Euroopan unionin ja Porin kaupungin osarahoittama. Rahoitusta välittävänä organisaationa toimii Satakuntaliitto.